






在很多问题中,动态规划算法是我们的最优选择,比起递归算法,动态规划算法的时间复杂度和空间复杂度都更加优越,可以处理的数据规模更大。但是,动态优化算法的时间复杂度为O(N*V),也就是说,当需要处理的数据规模较大时,使用动态规划算法也存在超时的可能性,因此,我们需要在动态规划的基础上做出优化。
1. 使用空间换时间:将中间结果缓存在数组中,避免重复计算。
2. 无后效性:假设问题可以分解为若干子问题,某些子问题的解可以不受其他子问题的解的影响,则可以去掉一些不必要的计算。
3. 剪枝:在搜索的过程中,利用一些条件限制最优解的范围,过滤掉不需要搜索的部分,提高性能。
4. 动态规划与贪心算法:当问题可以用贪心算法解决时,应优先使用贪心算法,它的时间复杂度要小于动态规划算法。
5. 构建最优解:利用最优子结构可以减少搜索的规模,进而提高搜索效率。
下面用一个具体的样例记录以下动态优化的过程:
题目描述:
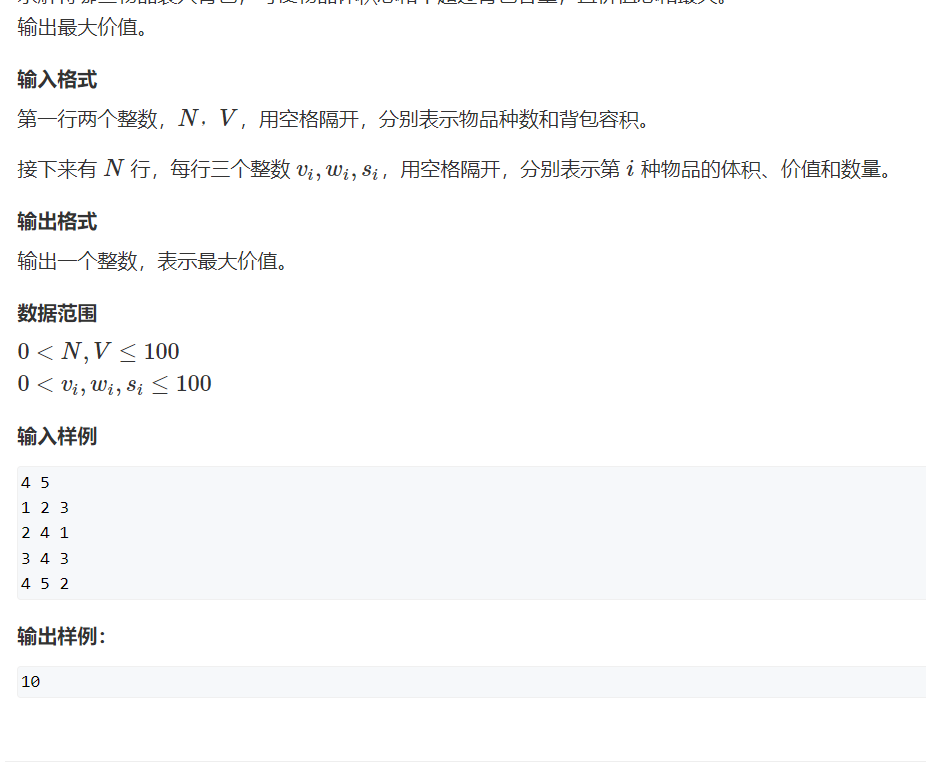
代码段:
这段代码在题目规定的时间内完成数据的计算,得到正确的结果。
题目升级:
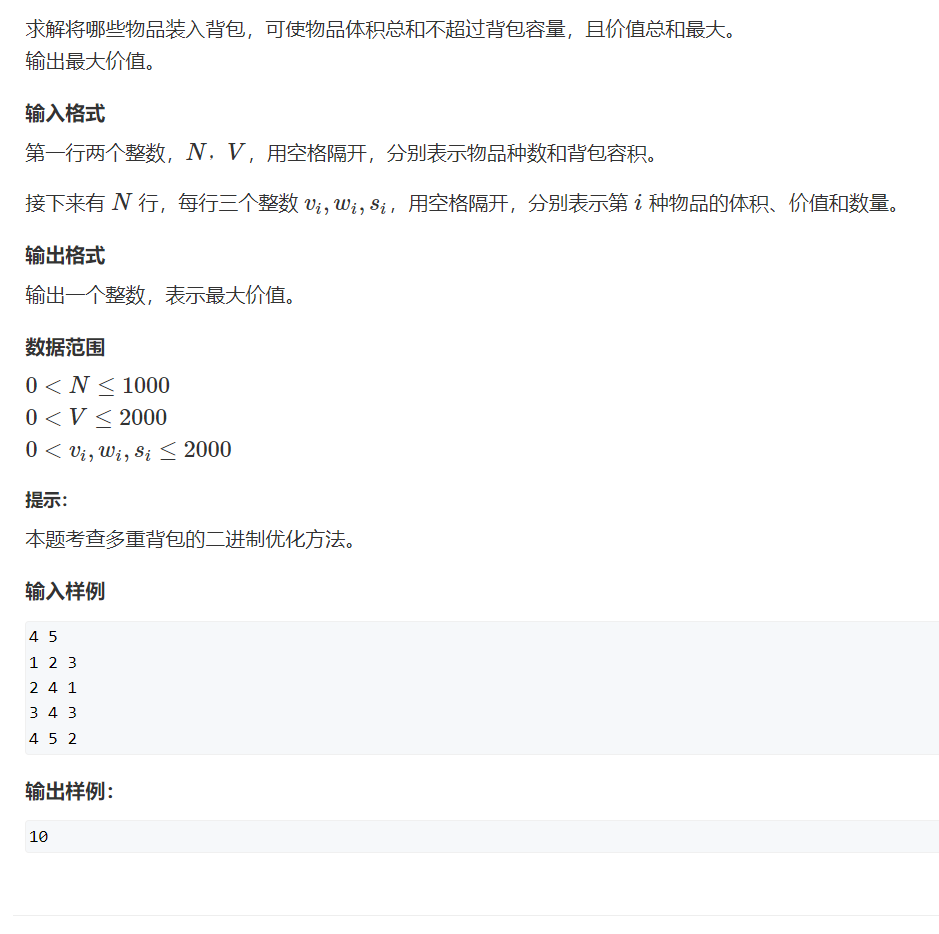
显然,和上面的题目相比,题干没有任何的变化,只是处理数据的规模变大了,而在处理该规模的数据时,上面的代码显示超时,也就是说,上述动态规划算法需要优化。
空间复杂度优化
上述代码将状态转移表由二维数组转换为一维数组,降低了代码对空间复杂度的要求,但是不难看出,虽然设置了一定的循环条件,代码的时间复杂度仍然是O(N*M),也就是,运行该题目仍然会超时。问题并没有解决。


两段代码均只能通过13组数据,因此,还需要在运行时间上进行优化。
时间复杂度优化
如何能够降低时间复杂度,我首先想到的是剪纸,通过一定的条件限制,比如二分法,将时间复杂度降维O(NlogM)。
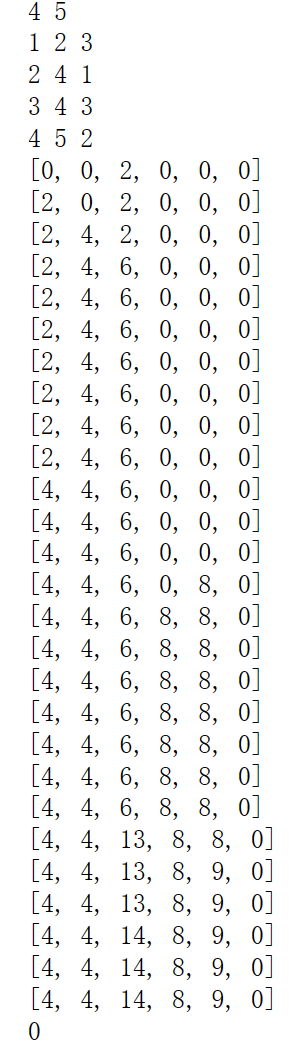
代码运行结果:
通过运行结果可以看出,这种方法错误。
标记+递归法代码:
这段代码表面上看上去和普通的递归法极为相似,但是实际上却有很大的不同。
普通递归法代码:
不同之处的分析:
普通递归法:在没有if条件语句的限制下,递归的搜索空间为 。加上if语句,可以减少部分分枝,但是当背包容量较大时,if语句所起的限制作用有限,时间复杂度趋近于O()
。加上if语句,可以减少部分分枝,但是当背包容量较大时,if语句所起的限制作用有限,时间复杂度趋近于O()
标记+递归:二进制机制用于标记每个物品状态,放入或者未放入背包。这种情况下,递归的搜索空间被缩小为n!。时间复杂度大大减小。
实质上,这两种算法的区别就是深度优先遍历和广度优先遍历的区别。
但是,标记+递归的时间复杂度还是过高,无法通过题目要求。
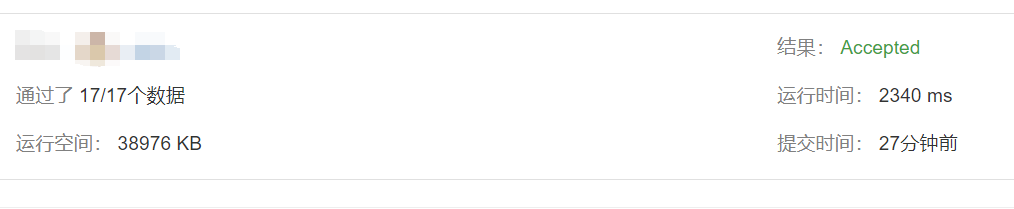
二进制+动态规划:
该方法通过测试。
总结:对算法进行优化时,需要综合考虑时间和空间复杂度。


